Powered Prostheses

Translating robotic walking to powered lower-limb prostheses to achieve stable, robust and efficient locomotion.
The goal of this effort is to develop the next generation of powered prostheses that enable natural and efficient dynamic locomotion. This includes the design of novel prostheses that combine actuation with compliance and human sensing to achieve high performance behaviors---and example is provided by the AMPRO device custom built at Caltech. Mathematical principles used to achieve dynamic walking on bipedal robots can be translated to these devices and coupled with the human to achieve dynamic behaviors in a rigorous fashion, wherein the nonlinear dynamics of the system can be leverage to achieve efficient and stable walking. The application of the next generation of nonlinear controllers to the device are being explored with the goal of achieving ever more dynamic behaviors including walking in real-world environments. The ultimate goal is to restore and augment the locomotion of lower-limb amputees ultimately improving their overall quality of life.
AMPRO3 walking the streets of Washington DC and demonstrating the human behavior of foot roll in walking.
AMPRO3 takes one step at a time in response to the human's behavior.
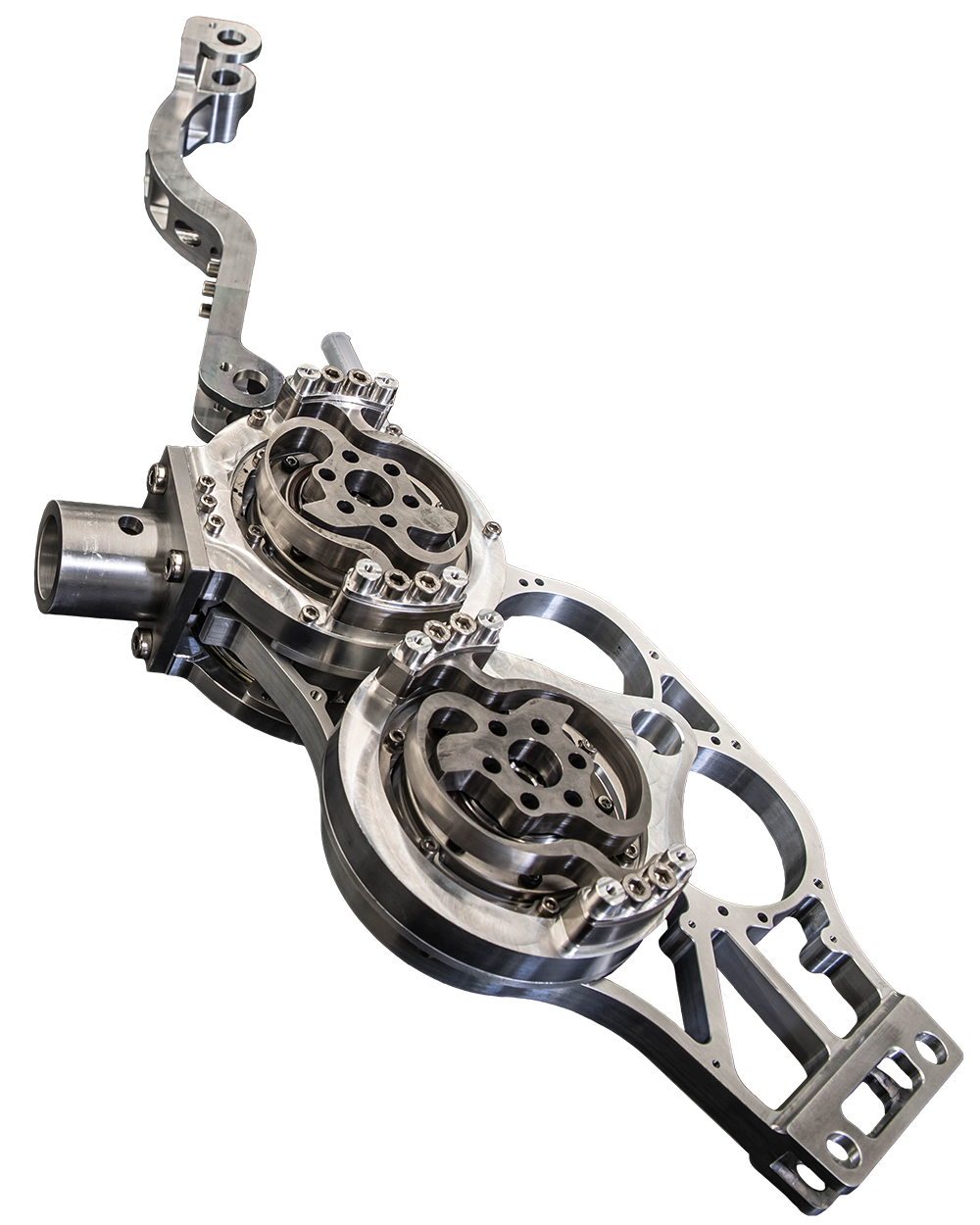
Flexing the ankle of the prosthesis. The top set of pulleys move when bending the knee. The bottom set of pulleys move when bending the ankle.
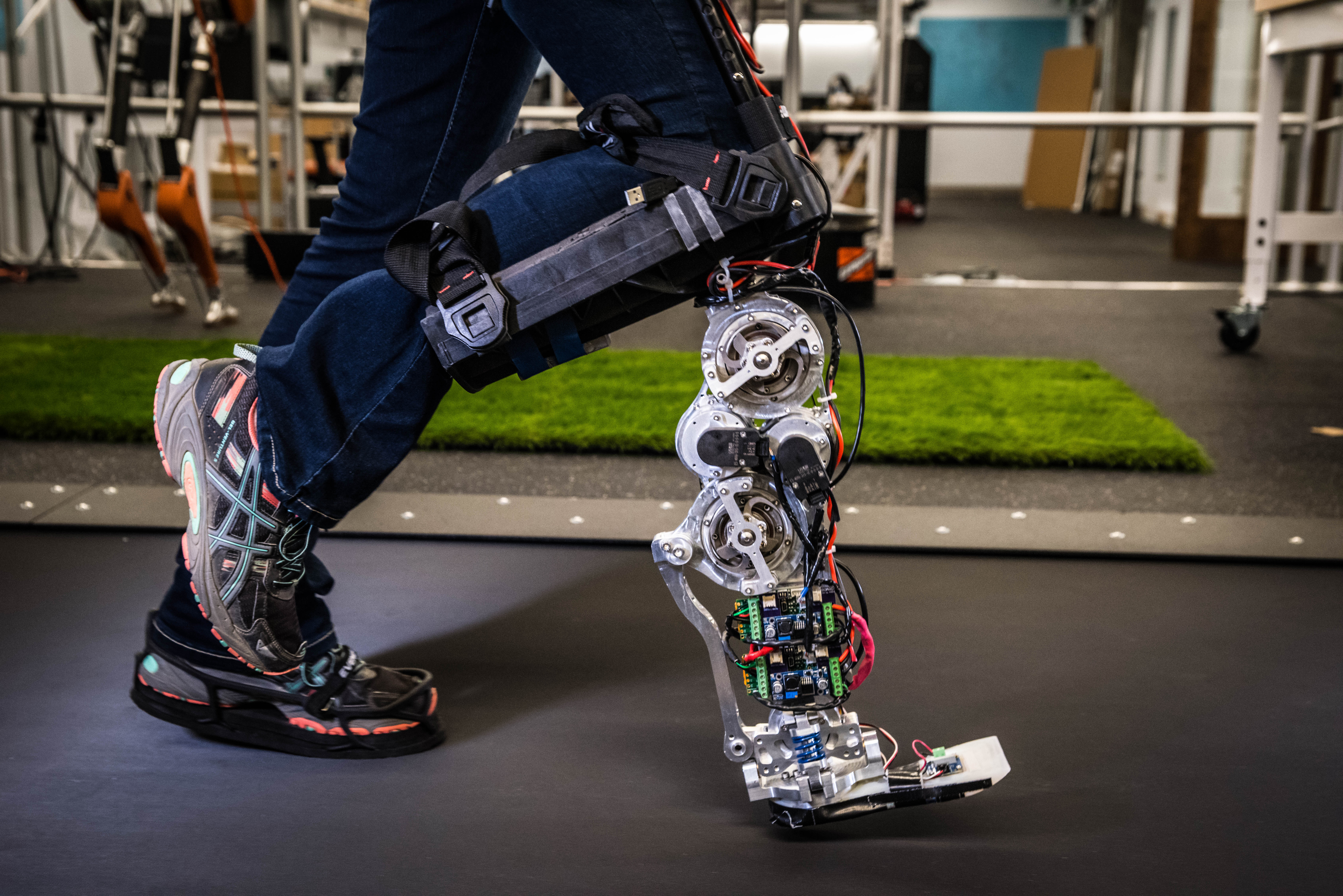
AMPRO3, a powered prosthesis, can be worn by a human user through the use of an iWalk adapter (as shown). It can also be connected directly into an amputee's socket.
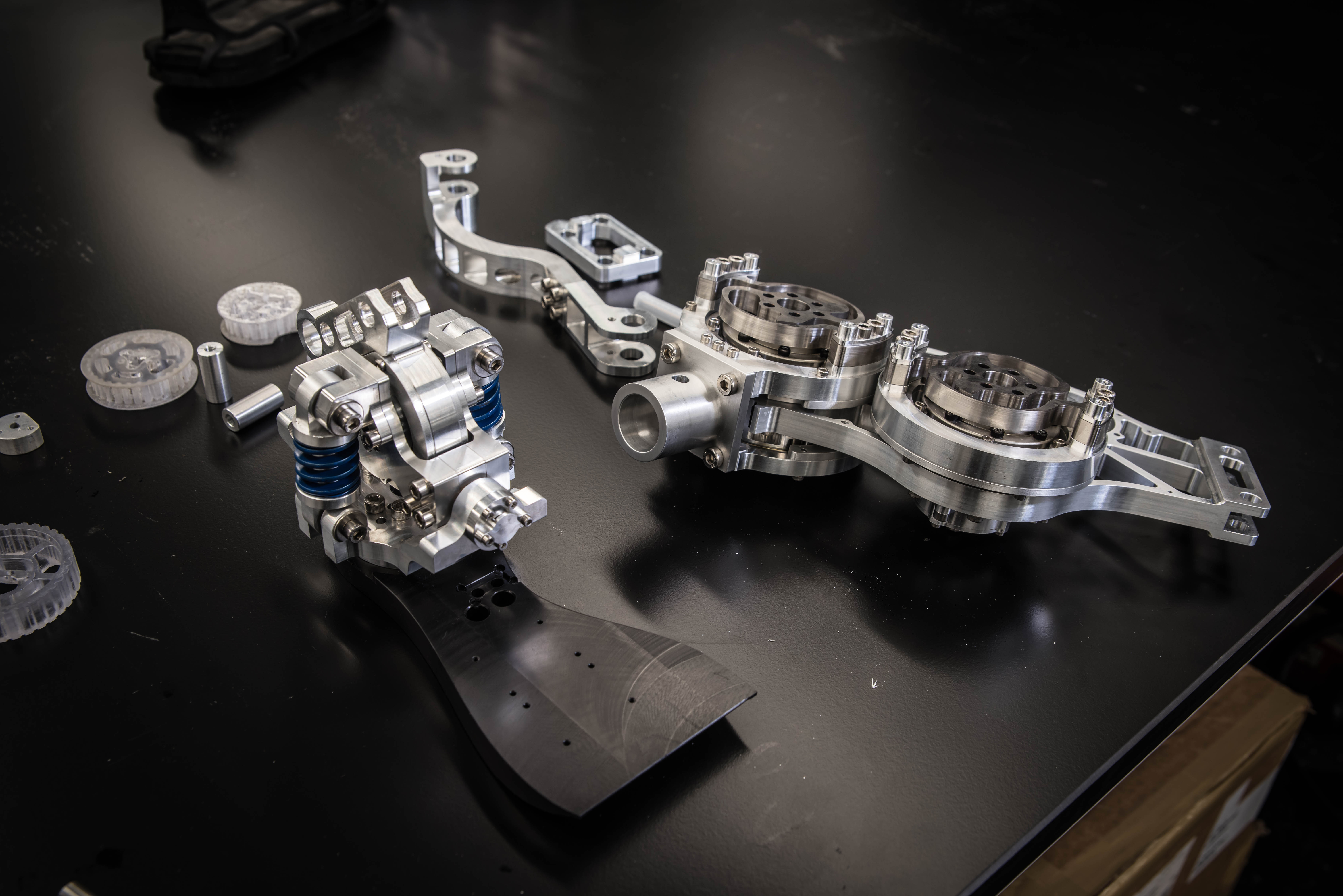
The partially assembled components of the newest powered prosthesis, AMPRO4. It is height adjustable; different sized links can be machined to attach the calf (right) to the ankle (left) to be the exact required height for the user.